摘自:Geatpy官方教程
Geatpy 是国内华南农业大学、暨南大学、华南理工大学三所高校联合编写的基于 Python 编程语言的遗传算法工具箱。初学者可以使用该工具箱简单高效地实现遗传算法。
Geatpy 拥有两种编程模式来实现遗传算法,分别是脚本编程和面向对象编程。 # 脚本编程法
脚本编程法类似于 MATLAB 的编程风格,易于理解,但是代码量较大。
可以通过一个实例来演示脚本编程的主要流程:
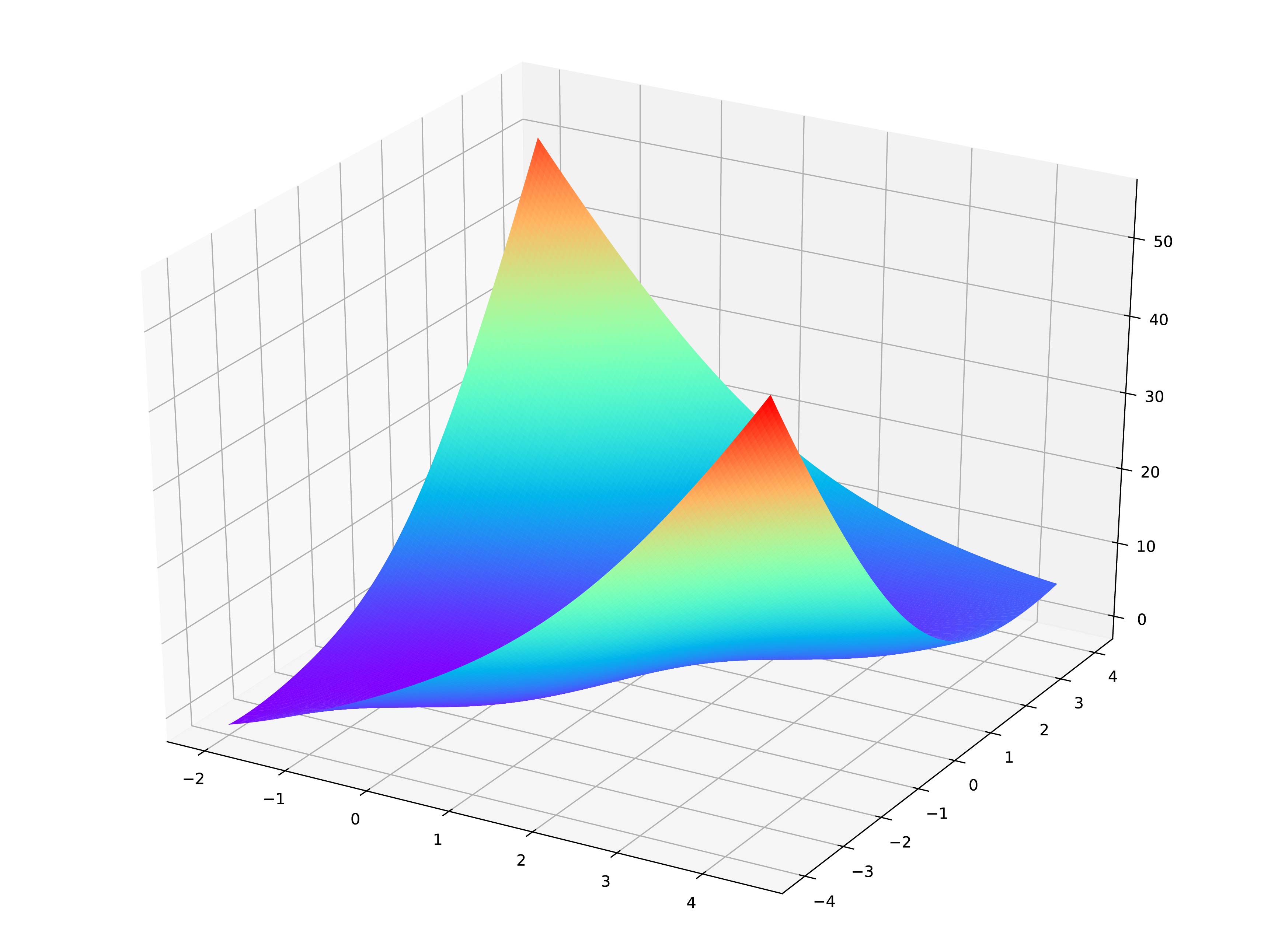
假设求解 McCormick 函数的最小值。这个函数是一个二元函数,表达式为: \[ f(x,y)=\sin(x+y)+(x-y)^2-1.5x+2.5y+1 \] 这个函数具有一个全局极小点:\(f(-0.54719,-1.54719)=-1.9133\),函数图像如下:
此处算法选择带有精英保留的遗传算法“Elitist Reservation GA",可编写以下执行脚本:
1 | # -*- coding: utf-8 -*- |
面向对象编程法
面向对象编程法通过实例化进化算法框架来完成实际编程。
Geatpy 进化算法框架包含四个大类,分别是:
- 算法模板类 (Algorithm)
- 种群类 (Population)
- 多染色体混合编码种群类 (PsyPopulation)
- 问题类 (Problem)
其中,Population 类和 PsyPopulation 类需要进行实例化,Algorithm 类和 Problem 类需要进行继承。
以下通过两个示例演示面向对象编程法的编程过程:
例1:带约束的单目标优化问题
问题模型:
\[ \begin{cases} \max f(x_1, x_2, x_3)=4x_1+2x_2+x_3\\ \text{s.t.}\quad 2x_1+x_2\leq 1\\ \quad \quad \ \ x_1+2x_3\leq 2\\ x_1\in[0,1],\quad x_2\in[0,1],\quad x_3\in(0,2) \end{cases} \]
全局最优解:\(f(0.5,0,0.5)=2.5\)
方法:差分进化算法“DE/best/1/L"
代码实现如下:
通过继承 Problem 类描述问题模型: “MyProblem1.py" 文件:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32# -*- coding: utf-8 -*-
"""MyProblem1.py"""
import numpy as np
import geatpy as ea
class MyProblem1(ea.Problem): # 继承Problem类
def __init__(self):
name = 'MyProblem' # 函数名称
M = 1 # 目标维数
maxormins = [-1] # 最小最大化标记列表,1为最小化,-1为最大化
Dim = 3 # 变量维数
varTypes = [0] * Dim # 变量类型,0为连续,1为离散
lb = [0, 0, 0] # 变量下界
ub = [1, 1, 2] # 变量上界
lbin = [1, 1, 0] # 变量上边界
ubin = [1, 1, 0] # 变量下边界
# 调用父类构造方法完成实例化
ea.Problem.__init__(self, name, M, maxormins, Dim, varTypes,
lb, ub, lbin, ubin)
def aimFunc(self, pop): # 目标函数,传入种群对象
Vars = pop.Phen # 决策变量矩阵
# 变量列向量
x1 = Vars[:, [0]]
x2 = Vars[:, [1]]
x3 = Vars[:, [2]]
pop.ObjV = 4 * x1 + 2 * x2 + x3 # 目标函数值
# 生成违反约束程度矩阵,小于或等于零满足约束,大于零违反约束
pop.CV = np.hstack([2 * x1 + x2 - 1, # 第一个约束
x1 + 2 * x3 - 2, # 第二个约束
np.abs(x1 + x2 + x3 - 1)]) # 第三个约束上述程序使用了可行性法定义约束条件,也可使用罚函数法定义:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16def aimFunc(self, pop):
Vars = pop.Phen # 决策变量矩阵
# 变量列向量
x1 = Vars[:, [0]]
x2 = Vars[:, [1]]
x3 = Vars[:, [2]]
pop.ObjV = 4 * x1 + 2 * x2 + x3 # 目标函数值
# 采用罚函数法处理约束
exIdx1 = np.where(2 * x1 + x2 > 1)[0] # 找到违反约束一的个体
exIdx2 = np.where(x1 + 2 * x3 > 2)[0] # 找到违反约束二的个体
exIdx3 = np.where(x1 + x2 + x3 != 1)[0] # 找到违反约束三的个体
exIdx = np.unique(np.hstack([exIdx1, exIdx2, exIdx3])) # 合并索引
alpha = 2 # 惩罚缩放因子
beta = 1 # 惩罚最小偏移量
f[exIdx] += self.maxormins[0] * alpha * (np.max(f) - np.min(f) + beta)
pop.ObjV = f # 将目标函数值矩阵赋给种群的ObjV属性编写执行脚本调用模板进行求解 “main1.py”文件:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38# -*- coding: utf-8 -*-
"""main1.py"""
import numpy as np
import geatpy as ea
from MyProblem1 import MyProblem1
# ============================== 实例化问题对象 =================================
problem = MyProblem1()
# ================================= 种群设置 ===================================
Encoding = 'RI' # 编码方式
NIND = 50 # 种群规模
# 创建区域描述器
Field = ea.crtfld(Encoding, problem.varTypes, problem.ranges, problem.borders)
# 实例化种群对象
population = ea.Population(Encoding, Field, NIND)
# =============================== 算法参数设置 ==================================
# 实例化模板对象
myAlgorithm = ea.soea_DE_best_1_L_templet(problem, population)
myAlgorithm.MAXGEN = 1000 # 最大遗传代数
myAlgorithm.mutOper.F = 0.5 # 设置差分进化的变异缩放因子
myAlgorithm.recOper.XOVR = 0.5 # 设置交叉概率
myAlgorithm.drawing = 1 # 设置绘图方式,0为不绘图,1为绘制结果图,2为绘制进化过程动态图
# ========================== 调用算法模板进行种群进化 =============================
[population, obj_trace, var_trace] = myAlgorithm.run() # 执行算法模板
# 输出结果
best_gen = np.argmax(obj_trace[:, 1])
best_ObjV = obj_trace[best_gen, 1]
print('最优的目标函数值为:%s' % (best_ObjV))
print('最优的决策变量值为:')
for i in range(var_trace.shape[1]):
print(var_trace[best_gen, i])
print('有效进化代数:%s' % (obj_trace.shape[0]))
print('最优的一代是第%s代' % (best_gen + 1))
print('评价次数:%s' % (myAlgorithm.evalsNum))
print('时间已过%s秒' % (myAlgorithm.passTime))
例2:带约束的多目标优化问题
- 问题: \[ \min= \begin{cases} f_1(x,y)=4x^2+4y^2\\ f_2(x,y)=4(x-5)^2+4(y-5)^2 \end{cases}\\ \text{s.t.}= \begin{cases} g_1(x,y)=(x-5)^2+y^2\leq25\\ g_2(x,y)=(x-8)^2+(y-3)^2\geq7.7\\ 0\leq x\leq 5,\quad 0\leq y\leq 3 \end{cases} \]
问题类:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39# -*- coding: utf-8 -*-
"""MyProblem2.py"""
import numpy as np
import geatpy as ea
class MyProblem2(ea.Problem):
def __init__(self):
name = 'BNH' # 函数名称
M = 2 # 目标维数
maxormins = [1] * M # 最大、最小
Dim = 2 # 变量维数
varTypes = [0] * Dim # 变量类型
lb = [0] * Dim # 变量下界
ub = [5, 3] # 变量上界
lbin = [1] * Dim # 变量下边界
ubin = [1] * Dim # 变量上边界
# 调用父类构造方法
ea.Problem.__init__(self, name, M, maxormins, Dim, varTypes, lb, ub,
lbin, ubin)
def aimFunc(self, pop): # 目标函数
Vars = pop.Phen # 得到变量矩阵
x1 = Vars[:, [0]]
x2 = Vars[:, [1]]
f1 = 4 * x1**2 + 4 * x2**2
f2 = (x1 - 5)**2 + (x2 - 5)**2
# 采用可行性法则处理约束
pop.CV = np.hstack([(x1 - 5)**2 + x2**2 - 25,
-(x1 - 8)**2 - (x2 - 3)**2 + 7.7])
# 把求得的目标函数赋给种群pop的ObjV
pop.ObjV = np.hstack([f1, f2])
def calBest(self): # 计算全局最优解
N = 10000 # 遇得到10000个真实帕累托前沿点
x1 = np.linspace(0, 5, N)
x2 = x1.copy()
x2[x1 >= 3] = 3
return np.vstack((4 * x1**2 + 4 * x2**2, (x1 - 5)**2 + (x2 - 5)**2)).T执行脚本:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54# -*- coding: utf-8 -*-
"""main2.py"""
import geatpy as ea
from Myproblem2 import MyProblem2
# =============================== 实例化问题对象 ================================
problem = MyProblem2()
# ================================== 种群设置 ==================================
Encoding = "RI" # 编码方式
NIND = 100 # 种群规模
# 创建区域描述器
Field = ea.crtfld(Encoding, problem.varTypes, problem.ranges, problem.borders)
# 实例化种群对象
population = ea.Population(Encoding, Field, NIND)
# =============================== 算法参数设置 ==================================
# 实例化算法模板对象
myAlgorithm = ea.moea_NSGA2_templet(problem, population)
myAlgorithm.MAXGEN = 200 # 最大遗传代数
myAlgorithm.drawing - 1 # 绘图方式
# =========================== 调用算法模板进行种群进化 ============================
# 调用run执行算法模板,得到帕累托最优解集NDSet。
# NDSet是一个种群类Population的对象。
# NDSet.ObjV为最优解个体的目标函数值;NDSet.Phen为对应的决策变量值。
# 详见Population.py中关于种群类的定义。
NDSet = myAlgorithm.run() # 执行算法模板,得到非支配种群
NDSet.save() # 把结果保存到文件中
# 输出
print('用时:%f秒' % (myAlgorithm.passTime))
print('评价次数:%d次' % (myAlgorithm.evalsNum))
print('非支配个体数:%d个' % (NDSet.sizes))
print('单位时间找到帕累托前沿点个数:%d个' % (int(NDSet.sizes // myAlgorithm.passTime)))
# 计算指标
PF = problem.getBest() # 获取真实前沿
if PF is not None and NDSet.sizes != 0:
GD = ea.indicator.GD(NDSet.ObjV, PF) # 计算GD指标
IGD = ea.indicator.IGD(NDSet.ObjV, PF) # 计算IGD指标
HV = ea.indicator.HV(NDSet.ObjV, PF) # 计算HV指标
Spacing = ea.indicator.Spacing(NDSet.ObjV) # 计算Spacing指标
print('GD: %f' % GD)
print('IGD: %f' % IGD)
print('HV: %f' % HV)
print('Spacing: %f' % Spacing)
# ======================== 进化过程指标追踪分析 ==================================
if PF is not None:
metricName = [['IGD'], ['HV']]
[NDSet_trace,
Metrics] = ea.indicator.moea_tracking(myAlgorithm.pop_trace, PF,
metricName, problem.maxormins)
# 绘制指标追踪分析图
ea.trcplot(Metrics, labels=metricName, titles=metricName)